ME2110 Project
Overview
This was a semester-long project that required teamwork to design and build an autonomous robot with the hopes of outperforming other teams. As the semester moved forward, subsystems were added and the complexity of the robot increased until finally, a competition was held where the robot was pitted against the others. We were fortunate enough to get 8th place out of over 50 teams; considering we scrapped our whole design halfway through the semester, this was a great success for us.
Project Goals & Guidelines
Below is the competition board that the robot was designed for. In order for the team to be qualified for the competition, the robot had to fit inside the Go/No-Go Gage box. Though only the yellow team is fully depicted below, each team, at each side of the board, would be set up the exact same way. Each team was required to start behind the Starting Line, and stay within their Home Zone. If a team didn't do these things, they would be disqualified.
Out of the 4 competing robots, the one with the most points after the round was complete, would win. Each team was given 2 mousetraps, as well as a mechatronics kit consisting of pneumatic actuators, solenoids, dc motors, and various sensors. A myRIO was used to hold and facilitate the code that would run the robot autonomously. Each team was given a flag that was to be placed on the dome, as well as Sensor Decoys that were to be placed in other team areas.
In summary, the main functions of the robot were:
To launch
Clear the rocks from around the Sea of Tranquility
Avoid the Lunar Module
Deploy the Sensor Decoys
Place the flag on the Lunar Ridge
Egress from the Lunar Ridge

Concept Generation
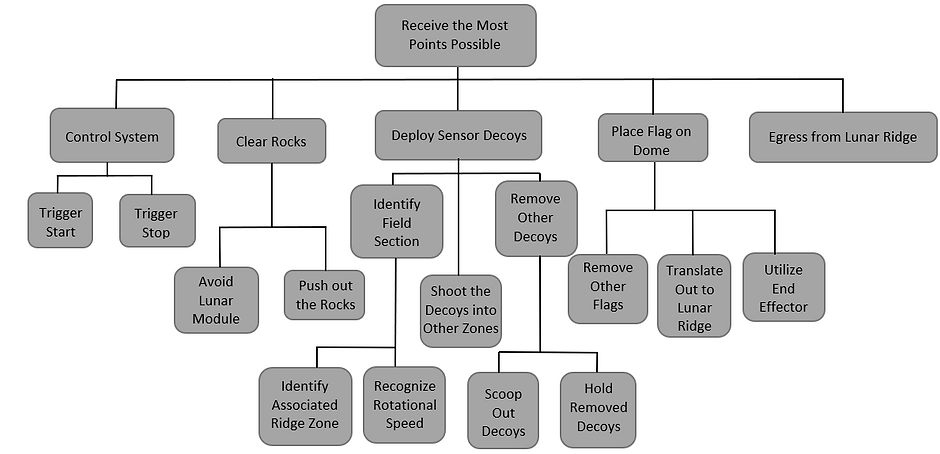
Once the general functions of the robot were determined, various tools were used to convert these ideas into a single design that addressed the general functionality needed. The tools used include a specification sheet, function tree, morphological chart and evaluation matrix. Below is the function tree we used.
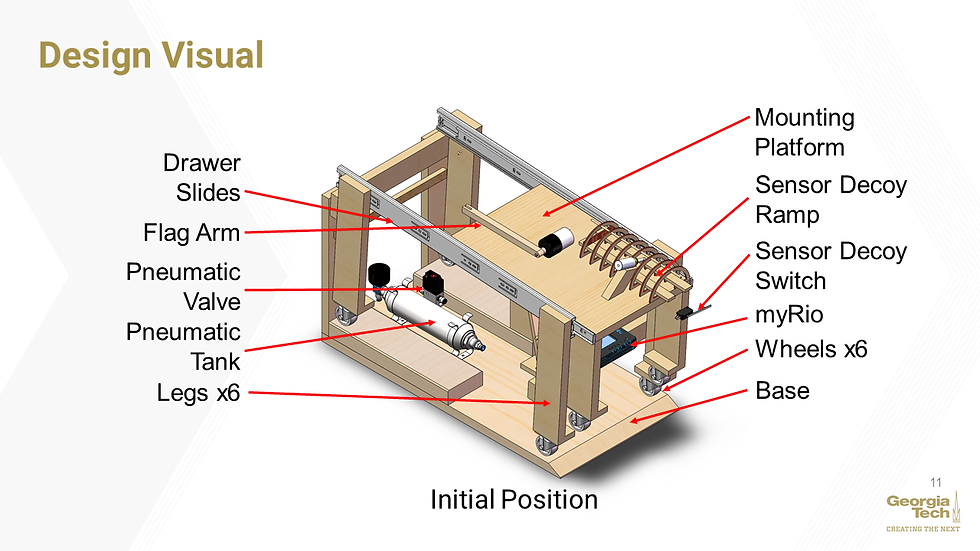
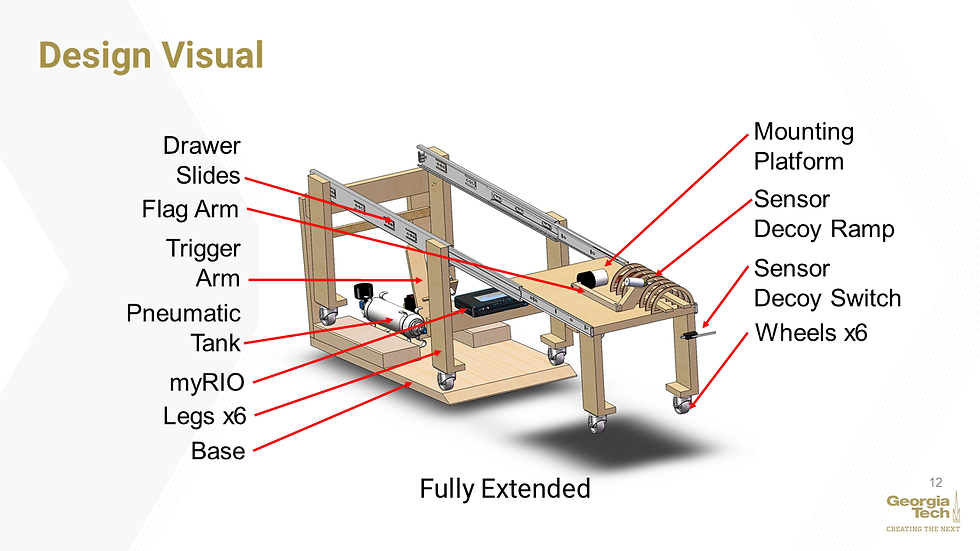
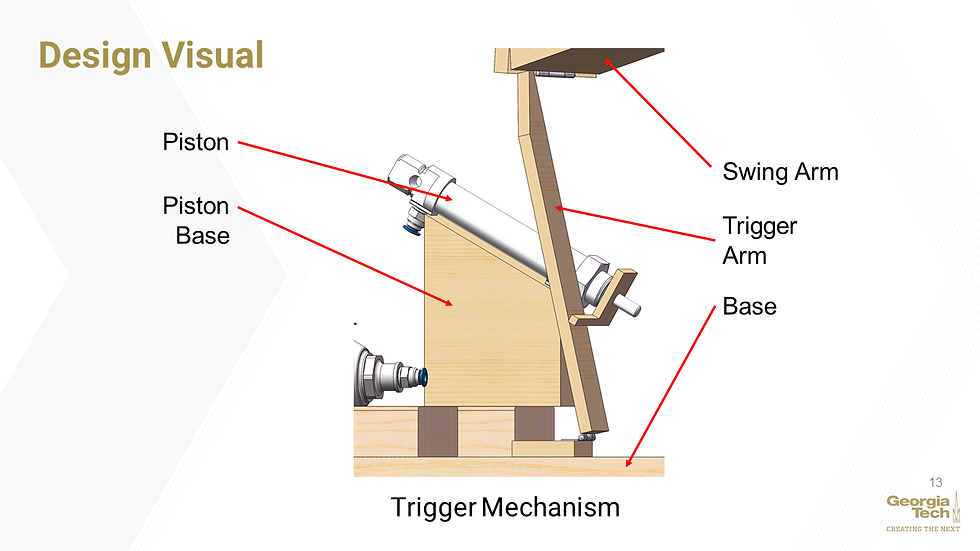
Final Result
Finally, the design was complete, and building the robot was all that was left. Below is a set of CAD renderings for the design that was used for the final competition. Before the robot even moves, the dc motor on the mounting platform began to rotate the flag forward. Once the time was right, the robot was released into action by a pneumatic actuator. The 2 outer rocks were then cleared by the legs while the middle rock was cleared by an arm that was timed to swing down and knock the rock outside of the Sea of Tranquility while avoiding the Lunar Module. Meanwhile, the flag has been planted and the Sensor Decoy Switch is detecting the beacons to determine the correct time to deploy the Sensor Decoys.